机构名称:
¥ 1.0
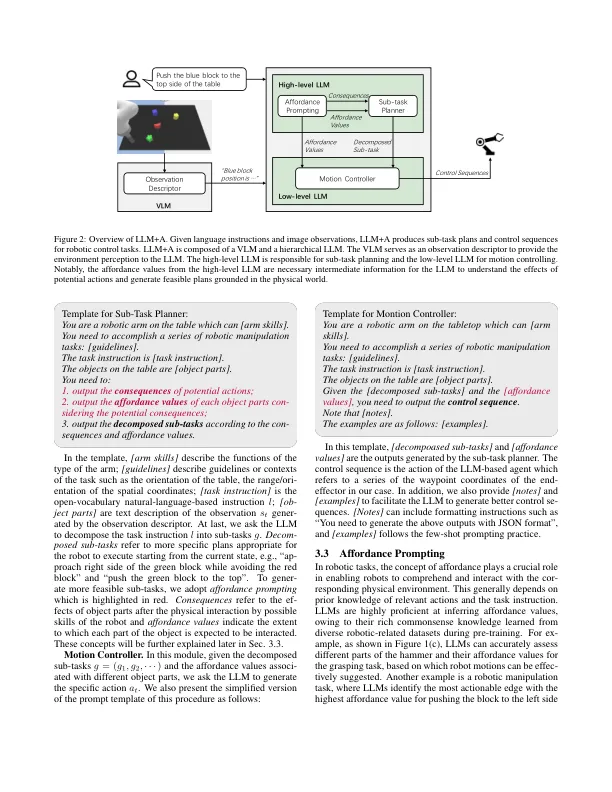
虽然大型语言模型(LLM)在完成各种语言处理任务方面取得了成功,但它们通过正确生成控制序列而轻松地无法与物理世界进行交互。我们发现,主要原因是LLM并非基于物理世界。现有的基于LLM的方法通过依靠其他预定义的技能或预先训练的亚物质来解决此问题,从而使很难适应新任务。相比之下,我们旨在解决这个问题,并提示提示预先训练的LLMS在无训练范式中完成一系列机器人操纵任务。因此,我们提出了一个称为LLM+A(ffordance)的框架,其中LLM既可以用作子任务计划者(该一代高级计划)和运动控制器(生成低级控制序列)。为了将这些计划并控制在物理世界上,我们开发了可承受的提示技术,该技术将LLM刺激到1)预测生成计划的后果; 2)对于相关对象而言,生成的计划值得负担得起。经验,我们评估了LLM+A在各种语言条件的机器人操作任务中的有效性,这表明我们的方法通过增强生成的计划和控制的可行性而实质上改善了性能,并且可以轻松地对不同的环境产生。
自主计算的愿景:LLM可以使其成为现实吗?
主要关键词



相关文件推荐